

Informes técnicos
Estudio del efecto del herrado sobre la locomoción equina mediante el empleo de sensores inerciales
Study of the effect of shoeing on equine locomotion using inertial sensors
 Paula Analía Cánepa pcanepa@fcv.unlp.edu.ar
Paula Analía Cánepa pcanepa@fcv.unlp.edu.ar
Analecta Veterinaria
Universidad Nacional de La Plata, Argentina
ISSN: 0365-5148
ISSN-e: 1514-2590
Periodicidad: Frecuencia continua
vol. 44, e086, 2024
Recepción: 11 Febrero 2024
Revisado: 27 Mayo 2024
Aprobación: 04 Junio 2024

Resumen: Este artículo describe el diseño e implementación de un sistema registrador de datos ad hoc, para el monitoreo de los principales efectos cinemáticos que imponen los protocolos de desvasado y herrado sobre el equilibrio dinámico del pie en equinos. Este método constituye una solución de bajo costo, que utiliza sensores de mediciones inerciales (IMU’s). Se expone el uso de entornos abiertos para la representación de datos y se analizan estadísticamente las magnitudes medias de aceleración y velocidad angular registradas en los cascos de la población equina estudiada a los 0, 15, 30 y 40 días después de implementar un protocolo de desvasado y herrado estándar. Los resultados obtenidos indican diferencias significativas entre las mediciones (p<0,05). El acondicionamiento efectuado influyó favorablemente sobre el equilibrio dorsopalmar, vertical y lateromedial del pie, amplió la superficie de carga sobre la región palmar y mejoró la ejecución de las instancias de contacto y de apoyo hasta el día 40, cuando la carga tendió a distribuirse de forma asimétrica en sentido lateromedial. La asociación entre el desvasado y herrado y el equilibrio del pie fue significativa (r=0,97), por lo que estas prácticas y la frecuencia de su realización deberían ser tenidas en cuenta a la hora de evaluar su efecto en el animal.
Palabras clave: Equinos, herrado, cinemática, sensores inerciales, registro de datos.
Abstract:
This article describes the design and implementation of an ad hoc data logger system to monitor kinematic effects imposed by trimming and shoeing protocols on the dynamic balance of the equine hoof. This method is a low-cost solution, that uses inertial measurement sensors (IMU's). Data representation in open software is presented and the average acceleration and angular velocity recorded on days 0, 15, 30, 40 after implementing a standard trimming and hoof shoeing protocol are statistically analyzed. The results indicated significant differences between measurements (p<0.05). Conditioning favored the dorsopalmar, vertical and lateromedial hoof balance, increased the load on the palmar region and optimized the contact and support until day 40, when the load was distributed asymmetrically in lateromedial direction. Association between shoeing practices and hoof balance was significant (r=0,97), so their application, as well as their frequency of implementation, should be taken into consideration when evaluating the effect on the animal. Equine, shoeing, kinematic, inertial sensors, data logging
Keywords: Equine, shoeing, kinematic, inertial sensors, data logging.
Introducción
El análisis mecánico de los efectos cinemáticos que imponen el desvasado y el herrado en equinos puede efectuarse a partir del análisis cualitativo o cuantitativo. La exploración cualitativa de la marcha emplea el recurso metodológico de la inspección dinámica, la cual constituye el pilar de la práctica clínica. Su desarrollo radica en la descomposición del movimiento en fases e instancias siguiendo un criterio temporal, aporta datos sobre sincronismo, coordinación y fluidez y permite evaluar la eficacia del movimiento (Davidson, 2018; Serra Bragança et al., 2018).
Frente a las prácticas de desvasado y herrado impuestas, esta inspección se realiza a los efectos de esclarecer la efectividad de dichos procedimientos, entendiendo que los herrajes inadecuados constituyen un problema importante para los caballos en términos de rendimiento y bienestar animal (Antonioli et al., 2023).
La efectividad de estas prácticas se centra en alcanzar el correcto balance estático y dinámico del pie (Kelleher et al., 2021; Leśniak et al., 2017), minimizar la ocurrencia de asimetrías del apoyo, optimizar la magnitud temporal de los diferentes eventos de la marcha, mejorar la trayectoria de los miembros en fase de avance, anular la presencia de interferencias de la marcha (roce, alcance, forjado, toque cruzado, escalpado) y minimizar o atenuar claudicaciones relacionadas con afecciones podales.
Al constituir este análisis un estudio subjetivo, la capacidad de reconocer patrones de movimiento con precisión requiere práctica y experiencia (Leelamankong et al., 2020).
Por otro lado, no existe un protocolo estándar de evaluación subjetiva de la marcha. Este examen puede variar, desde la inspección del animal al trote sobre una superficie dura, con o sin círculos adicionales, hasta el desarrollo de protocolos más meticulosos que incluyen evaluaciones exhaustivas sobre superficies duras y blandas, bajo todos los aires de la marcha e, inclusive, con el animal montado (Serra Bragança et al., 2018).
En contraste, los métodos objetivos, que antes se limitaban a los laboratorios de la marcha, se están ampliando actualmente a técnicas de campo que utilizan acelerómetros y unidades de medición inercial (Greve & Dyson, 2020). Estos métodos automáticos tienen el potencial de ofrecer información objetiva e imparcial sobre la marcha, permitiendo mejorar la eficiencia, repetibilidad y confiabilidad de los resultados obtenidos, facilitando la toma de decisiones clínicas (Serra Bragança et al., 2018).
Varios sistemas se hallan disponibles comercialmente para evaluar, de forma objetiva, la marcha a campo. Sin embargo, acceder a dichos dispositivos supone, para el usuario, un alto costo económico en términos de adquisición y mantenimiento de licencias de uso (Atkins et al., 2019). Por esta razón, el conocimiento basado en evidencia sobre los cambios estáticos y dinámicos que ocurren en los cascos, asociados con los intervalos de desvasado y herrado, sigue siendo escaso (Antonioli, et al., 2023; Leśniak et al., 2017).
En este contexto, la hipótesis de este trabajo se centró en demostrar que, dentro de los 40 días posteriores al herrado, no se evidencian cambios significativos en el comportamiento de las variables. Para ello, el objetivo de este trabajo consistió en diseñar y utilizar un instrumento para la recolección de datos, de bajo costo, que permitiera registrar las principales modificaciones de la mecánica locomotora en equinos adultos, durante un intervalo de desvasado y herrado de 40 días. Para evaluar la validez de este dispositivo inercial, las magnitudes registradas se compararon con las reportadas mediante el uso de otros instrumentos comerciales equiparables.
Descripción metodológica
Diseño experimental
Para este estudio se aplicó un diseño observacional, longitudinal y prospectivo, sobre un universo de siete equinos adultos con examen clínico habilitante para su inclusión y herrados regularmente por un mismo herrador de experiencia en correcciones del casco. El protocolo de trabajo fue aprobado por el Comité Institucional de Cuidado y Uso de Animales de Laboratorio (CICUAL) de la Facultad de Ciencias Veterinarias de la Universidad de La Plata, en el marco de la resolución N°114-10-21T.
Instrumento para la recolección de datos
Características del dispositivo
Se utilizó un dispositivo portátil basado en un conjunto compuesto por un sensor inercial que combina un giroscopio de 3 ejes y un acelerómetro de 3 ejes en un mismo chip, el cual integra un procesador digital de movimiento capaz de realizar complejos algoritmos de captura de movimiento con seis grados de libertad, con un rango de escala programable de 250 grados/segundo (g/s), 500g/s, 1000g/s y 2000g/s para el giroscopio, y de 2g/4g/8g y 16g (g: aceleración debida a la gravedad), para el acelerómetro. El instrumento dispone, además, de un módulo de carga, un controlador ESP32, un lector de tarjeta SD, una fuente de alimentación y un software de representación. En la figura 1 se esquematiza el flujo del diseño y la relación entre los componentes.

Diseño del sistema de recolección de datos ad hoc que evalúa las principales modificaciones de la mecánica locomotora en equinos adultos. Relación entre los componentes.
Este sistema de recolección de datos analógicos y transformación de estos en variables digitales de aceleración y velocidad angular se diseñó para su implementación a campo, es decir, fuera de un centro de análisis y estudio de la marcha. Lograr este objetivo, implicó desarrollar, al menos, cuatro acciones básicas:
1- Efectivizar la alimentación de la placa y módulos asociados mediante una batería recargable. 2- Instalar un sistema de grabación y guardado de datos a medida que estos son obtenidos en tiempo real. 3- Dotar al dispositivo de capacidad Wifi con el objeto de establecer una comunicación con el operador. 4-Asignar una dirección IP (Internet Protocol) para conectarse a la red de este y obtener acceso a su consola de mandos.
Implementación del dispositivo data logger
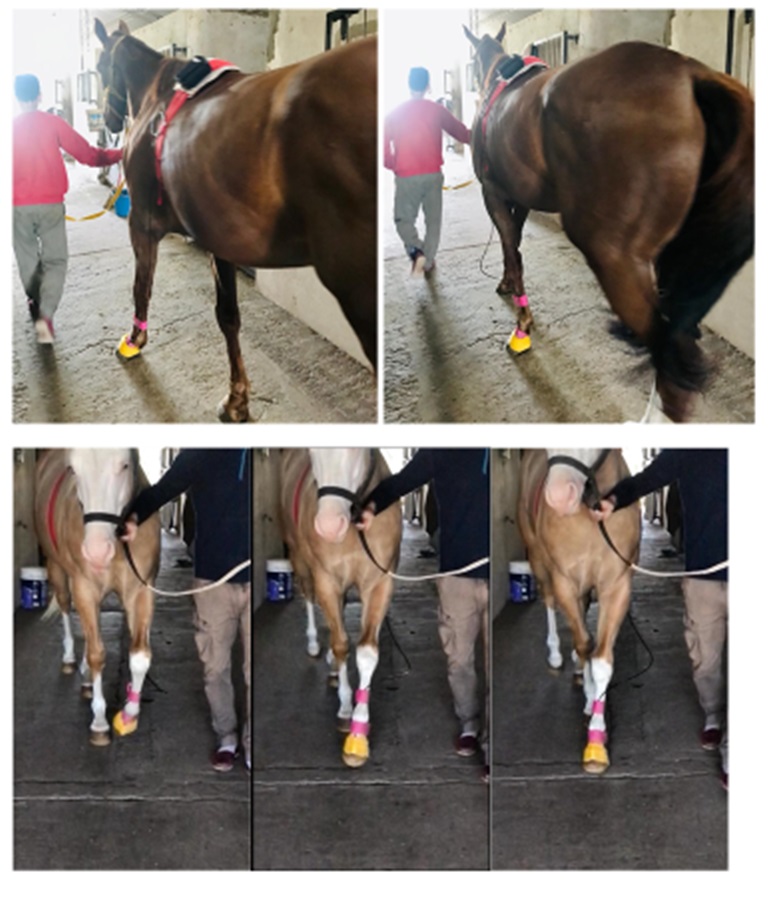
A los siete equinos intervinientes en el estudio, se les colocó una cincha con el dispositivo. El sensor se fijó al casco en pinzas del miembro torácico izquierdo. Dado que el sensor se montó directamente sobre el casco, el ángulo de inclinación del fondo del sensor con respecto al plano x-z se calculó mediante trigonometría inversa, atendiendo a la angulación dorsopalmar que presentaba el casco de cada caballo, con el objeto de estandarizar los valores obtenidos. Una vez ubicado el sensor en el sitio estipulado, se protegió con cinta adhesiva de tipo vetrap para evitar movimientos excesivos de rebote y obtener rangos dinámicos reales de cada ciclo locomotor (Figura 2). Un ciclo locomotor comprendió el movimiento de apoyo y de elevación que experimentó el casco durante cada paso, registrándose un total de cinco pasos por medición. Los parámetros de grabación se establecieron en un tiempo total de 15 segundos y el tiempo de grabación entre datos se fijó en 10ms.
Operacionalización de la variable en estudio
Se seleccionaron siete indicadores cinemáticos, tomando como punto de referencia la articulación interfalángica distal.
Seis de los indicadores empleados se correspondieron con los valores de aceleración (az) y rotación (gyroz) sobre el eje z, (movimientos mediales o de medio moción y movimientos laterales o de latero moción), los valores de aceleración (ax) y rotación (gyrox) sobre el eje x (movimientos de flexión y dorsiflexión de la articulación interfalángica distal), y valores de aceleración (ay) y rotación (gyroy) sobre el eje y (movimientos ascendentes y descendentes). Todos estos movimientos se registraron durante cada ciclo locomotor del miembro torácico izquierdo, siendo relativos a la vertical para los ejes x - z y a la horizontal para el eje y. El rango de movimiento en el plano sagital sobre el eje x, se consideró como la distancia angular completa entre el movimiento de flexión (breakover point-retracción) y dedorsiflexión (protracción-contacto-apoyo propiamente dicho - apoyo medio) de la articulación interfalángica distal. El movimiento de abducción se midió a partir del análisis del giro sobre el eje y, mientras la extremidad avanzaba experimentando un arco de vuelo inclinado hacia afuera (izquierdos), mientras que el movimiento de aducción se calculó durante la fase de vuelo con inclinación hacia adentro (estevados). Este eje lateral alrededor del cual el giro se maximizó se supuso perpendicular al casco y constituyó en sí mismo una estimación de la alineación del sensor con respecto a su pared (Hagen et al., 2021). Los movimientos hacia abajo (área de la curva sinusoidal negativa) y hacia arriba (área de la curva sinusoidal positiva), en relación con el plano horizontal registrados por el acelerómetro del eje ., representaron el inicio (retracción del miembro) y el final (protracción del miembro) de las fases de elevación y de avance de cada zancada, respectivamente.
El séptimo indicador comprendió la duración de cada ciclo locomotor y sus respectivas fases. La escala de medición implementada para la cinemática angular registrada fue de intervalo, de acuerdo con el siguiente rango: grados de rotación por segundo [g/s]. Por convención, la aceleración angular positiva indica rotación en sentido antihorario (lateral), mientras que la negativa, un sentido horario (medial). La escala que se implementó para la magnitud del tiempo se estableció en milisegundos [ms] y [g] para la magnitud de aceleración.
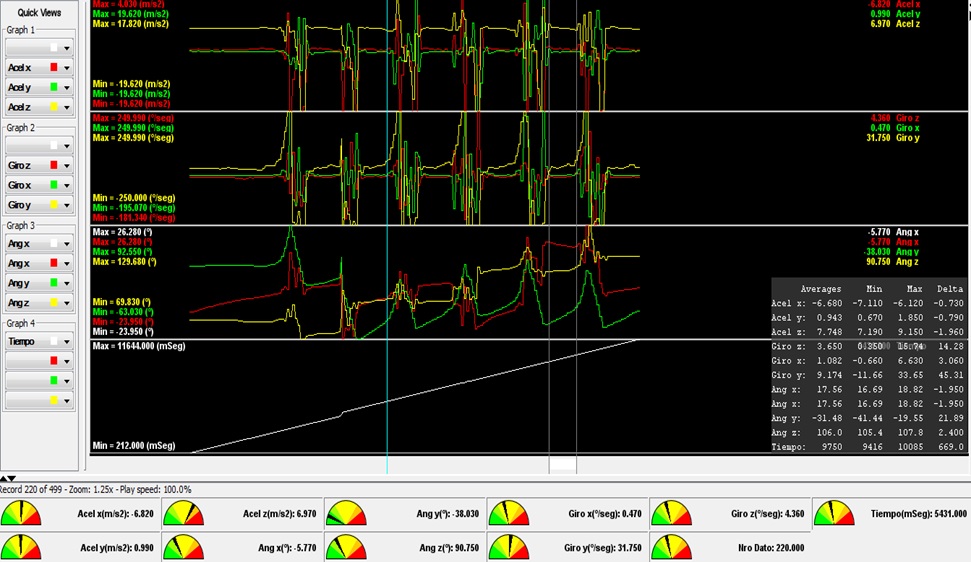
El número de impulsos de cada indicador se representó en cada eje durante cada paso en el entorno de visualización de datos MegaLogViewer HD Lite 4.5.05 de EFI Analytics, como se muestra en la figura 3.
Los indicadores se observaron en cinco ciclos locomotores contiguos, dentro de un intervalo de desvasado/herrado de 40 días. La primera medición se realizó al finalizar el desvasado/herrado. Con el objeto de esclarecer el período de adaptación biomecánica del pie frente al estímulo indirecto impuesto y valorar su relación directa con los cambios mecánicos registrados, se acondicionó nuevamente la extremidad con el sensor y se efectuaron mediciones a los quince, treinta y cuarenta días posteriores a la primera medición. Se calcularon los tiempos medios de cada fase e instancia, así como los valores medios de cada indicador, contemplando las cuatro mediciones totales/animal para cada variable en cada fase e instancia. Luego se calcularon los valores medios para los cinco ciclos consecutivos.
Las variables modificadoras o de control para mantener constantes las posibles influencias sobre la dimensión de la variable dependiente fueron: tipo de suelo, aire de la marcha y herrado mediante herradura de hierro convencional.
Para el análisis estadístico se incluyó una prueba de bondad de ajuste y un análisis de varianza (ANOVA) para comparar las respuestas medias al desvasado y herrado impuesto a los siete equinos en el tiempo y verificar si la variabilidad observada en la variable de respuesta (variables cinemáticas) obedeció y, de ser así en qué medida, a la variable explicativa (tiempo de medición). Asimismo, se calcularon los residuos y se realizó la prueba sobre la normalidad de estos (Shapiro-Wilk). El intervalo de confianza para la diferencia entre las medias se estableció al 95%, con un nivel de significación del 5%.
La diferencia interindividual para una misma condición experimental (día de muestreo) se constató mediante test de Student, suponiendo varianzas desiguales (p<0,05), mientras que la diferencia intraindividual para las distintas condiciones experimentales (entre dos muestreos consecutivos) se verificó mediante test de Student para muestras emparentadas (p<0,05).
El software estadístico escogido para realizar este análisis fue XLSTAT 2024 para Microsoft Excel ®.
Comportamiento de los indicadores en el entorno de representación
Los indicadores cinemáticos de aceleración se representaron en ciclos sinusoidales para los tres ejes ortogonales en función del tiempo, como se muestra en la figura 4. Los indicadores cinemáticos angulares quedaron representados bajo ciclos sinusoidales que aportan datos sobre los grados de rotación medial/lateral para los tres ejes ortogonales en función del tiempo. Un ciclo sinusoidal, compuesto por una fase de apoyo y una fase de elevación, representa un ciclo locomotor de la marcha. La frecuencia corresponde a la cantidad de ciclos/unidad de tiempo en milisegundos [ms], y el periodo al tiempo de duración de cada ciclo en milisegundos [ms].
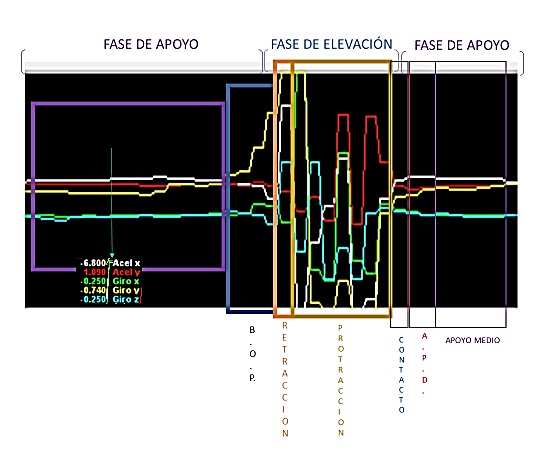
De acuerdo con la morfología de cada tramo que graficó cada sinusoide, se especificaron y analizaron datos correspondientes a las instancias de contacto, apoyo propiamente dicho, apoyo medio y breakover point (punto de rodadura del pie) de la fase de sostén y a las instancias de retracción y protracción de la fase de elevación.
Morfología de las fases de la marcha
Los tramos de la sinusoide a velocidad constante, con aceleración cercana a cero, corresponden a los apoyos, quedando esta fase representada por un periodo de movimiento rectilíneo uniforme, dado que el cuerpo a la marcha se encuentra en aceleración positiva, mientras el casco con el dispositivo permanece en apoyo.
Los tramos correspondientes a la fase de elevación se caracterizan por trayectos a velocidad lineal en aceleración positiva (trayectos de movimiento rectilíneo uniformemente acelerado) y por trayectos a velocidad lineal decreciente en función del tiempo y en aceleración negativa (movimiento rectilíneo uniforme retardado), conforme el pie se encuentra en fase de aceleración o desaceleración dentro del ciclo locomotor, a marcha constante y uniforme hacia adelante.
Morfología de las instancias que comprenden las fases de la marcha
La retracción se graficó mediante una onda sinusoidal limpia, esquematizando un claro sentido con amplitud y periodo definido, debido a la acción directa del tendón del músculo flexor digital profundo, dando lugar a la instancia de rodadura del casco y retracción por retroceso elástico de los tendones.
La protracción se graficó mediante una onda sinusoidal de varias cúspides, dado que, si bien el arco de vuelo que experimenta el pie en fase de avance tiende a representarse sagitalmente de forma parabólica y rectilínea, esto no acontece en el casco, el cual experimenta, en el plano parasagital, movimientos medio-laterales, pasivos, involuntarios, a medida que el miembro se encuentra avanzando en aceleración positiva.
El apoyo sobre el suelo en un solo tiempo (ambos talones de forma sincrónica) se caracterizó por un tramo de movimiento rectilíneo uniforme (MRU), el cual se mantuvo durante la instancia de apoyo propiamente dicho.
El apoyo asimétrico provocó la inclinación axial y rotación abaxial del casco, antes de su completa estabilización sobre el suelo (Chateau et al., 2002). Este evento se registró en la curva por un tramo a velocidad lineal en función del tiempo con aceleración que difirió de cero. Esta aceleración resultó positiva (tramo de movimiento rectilíneo uniformemente acelerado-MRUA-) o negativa (tramo de movimiento rectilíneo uniformemente retardado -MRUR-), de acuerdo con el sentido abaxial o axial de los movimientos registrados.
Durante el apoyo medio, la onda se representó por un tramo de MRUR. En este caso, la aceleración lineal fue negativa, a consecuencia del incremento de masa sobre el centro de presión del pie, recordando que, en esta instancia del apoyo, el miembro se recarga de peso vertical, y la resultante de la fuerza de reacción del suelo consecuente queda representada por un aumento de los valores negativos de aceleración lineal cercanos a cero, hasta que se alcanza una velocidad constante a aceleración cero.
La instancia de rollover se define como el momento inicial de despegue del talón, en el que el casco ha rotado más de medio grado desde la posición media, caracterizado por un tramo de MRUA. Pasado el momento de rollover, el pie comienza a alejarse del punto inicial en más de un centímetro, por lo que el casco se considera fuera del suelo (Hagen et al., 2021).
Aceleración y velocidad angular respecto del eje y
Las magnitudes registradas en términos de aceleración sobre el eje y, representaron los movimientos de ascenso y descenso del pie durante la fase de retracción y protracción. La aceleración lineal sobre este eje durante la fase de apoyo fue positiva con valores medios cercanos a cero (0,072g).
Las magnitudes de velocidad angular registradas sobre este eje en fase de elevación reflejaron desviaciones respecto al parabolismo rectilíneo de dicha fase. En aquellos caballos que presentaban desvíos rotacionales del pie, como en el caso de los caballos izquierdos o estevados, la gráfica de velocidad angular se representó como una onda sinusoidal con tendencia positiva o negativa, respectivamente.
El momento fue positivo cuando el punto o centro de giro se encontraba a la izquierda de la fuerza (sentido antihorario desde la fuerza hacia el punto) y negativo si era ejecutado en el sentido horario. La posición del punto se tomó teniendo en cuenta el sentido de la fuerza (Figura 5).
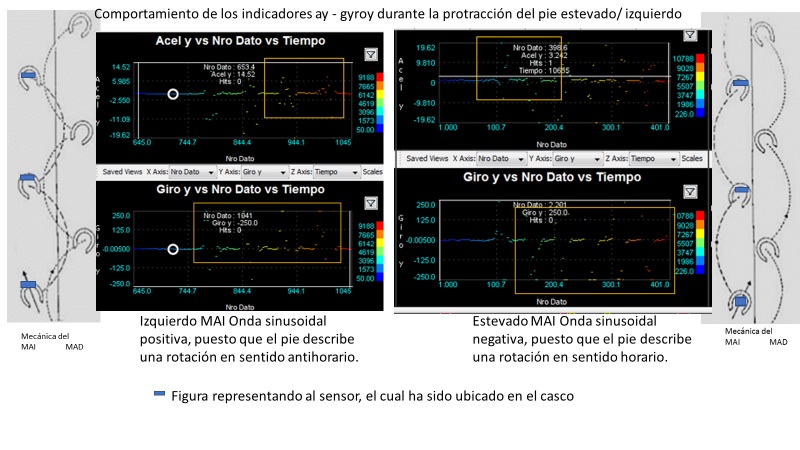
Se representa la aceleración estática del pie en apoyo (azul) y los ciclos 1 (turquesa), 2 (verde), 3 (amarillo), 4 (naranja) y 5 (rojo). Los valores graficados corresponden a datos de aceleración y de velocidad angular sobre el eje y, en función del tiempo.
Durante la fase de apoyo el valor medio de velocidad angular sobre el eje lateromedial (eje y: cabeceo) registrado al día 0 luego del herrado fue de 2,07g/s, alcanzando valores máximos de 4,98g/s al día 15. Esto supone un aumento gradual de la carga podal en sentido palmar. Hacia el día 40, estas magnitudes descendieron significativamente (p= 0,03) a 0,9g/s, dado que la estabilidad lateromedial comenzó a perderse.
Aceleración y velocidad angular respecto del eje x
Las magnitudes registradas en términos de aceleración sobre el eje x expresaron los movimientos de rodadura o breakover point del casco en pinzas y el contacto de los talones. La aceleración sobre este eje durante la fase de apoyo fue negativa, con valores medios de -0,72g, dado que se encontraba en fase de desaceleración y, sobre este eje comenzó a rotar en dirección opuesta al sentido de la marcha (breakover point- retracción).
Las magnitudes de velocidad angular registradas sobre este eje en fase de elevación reflejaron desviaciones rotacionales en caballos izquierdos o estevados, en los que el breakover point y el contacto se esquematizaron de forma bicúspide. Durante la fase de apoyo, el valor medio de velocidad angular alrededor del eje dorsopalmar (eje x: balanceo) registrada al día 0 es de -0,005g/s, reflejando el grado de estabilidad lateral alcanzado, mientras que al día 40 registró valores máximos de -1g/s. Esto indicó un predominio de rotación medial significativo durante la instancia de contacto y breakover point (p = 0,03). Este hecho, podría estar relacionado con la mayor cantidad de animales izquierdos incluidos en la población bajo estudio y, también, reflejar una redistribución del soporte de carga hacia medial.
Parámetro temporal: duración de las fases
El periodo promedio de los ciclos fue de 1,47s. La fase de elevación duró 0,05ms más en relación con la fase de apoyo para marchas sincrónicas (Tabla 1).
| Parámetros temporales día 0 día 15 día 30 Día 40 promedio total ciclo Valor medio de apoyo [ms] 722 753 715 745 734 1469 valor maximo [ms] 785 809 792 938 806 1612 valor mínimo [ms] 632 692 624 600 637 1274 Valor medio de elevación [ms] 722 754 718 744 734 valor maximo [ms] 786 809 792 934 806 valor mínimo [ms] 632 692 624 600 637 |
Al día 15 se observaron los valores más altos con respecto a la duración de ambas fases, obteniéndose un valor medio de apoyo=753ms, valor medio máximo de apoyo=809ms y valor medio mínimo de apoyo= 692ms. Al día 30 se observaron los valores más bajos, valor medio de apoyo=715ms, valor medio máximo apoyo=792ms y valor medio mínimo de apoyo= 624ms.
Esta misma observación se mantuvo para la fase de elevación, obteniéndose, al día 15, un valor medio de elevación =754ms, valor medio máximo de elevación de 809ms y valor medio mínimo de elevación =692ms. Al día 30, se observó un valor medio de elevación =718ms, valor medio máximo =792ms y valor medio mínimo =624ms. El coeficiente de correlación de Pearson calculado fue de 0,98, indicando una asociación en sentido directo entre dichas variables.
En la tabla 2 se consignan los valores medios, máximos y mínimos para la instancia de breakover point. El valor medio total del periodo de la instancia de breakover point fue de 99ms, mostrando similitud con los resultados obtenidos por Mormann et al. (2013). Se observaron valores medios máximos de duración al día 15 y valores medios mínimos al día 30 de efectuado el desvasado y herrado, para una población con una angulación dorso palmar promedio al día 0 de 49,12°, valor mínimo 48,50° y valor máximo 50,00° (D.S. 0,54).
| Punto de ruptura día 0 día 15 día 30 Día 40 promedio total Valor medio [ms] 102 103 94 96 99 valor maximo [ms] 123 111 111 105 112 valor mínimo [ms] 86 91 83 81 86 |
Las magnitudes temporales obtenidas se correlacionaron con la angulación dorso palmar promedio, obteniendo resultados concordantes con estudios realizados por Hagen et al. (2021), en el cual, el ángulo dorsopalmar de la población en estudio fue de 47,60° ± 3,38°, con una duración media de la instancia de breakover point posterior al día 0 de 118ms. El tiempo resultante fue ligeramente mayor al ser más aguda la angulación del casco de dicha población en comparación con la analizada en el estudio actual. En correlación con lo antedicho, un estudio de Clayton & Hobbs (2017), asoció una angulación media de 53,70° con una instancia de breakover point más breve que en el estudio actual. Tanto el estudio realizado por Hagen et al. (2021) como el estudio actual, mostraron una correlación negativa moderada entre la duración del breakover y el ángulo natural del casco al paso. Este hecho podría deberse a que la variación de la angulación de los cascos de los siete equinos estudiados era bastante baja (D.S. 0,54).
Las variaciones entre valores medios mínimos y máximos de duración del breakover point obedecieron a diferencias en el ritmo y velocidad de la marcha ejecutada al paso. Esta observación es coincidente con las afirmaciones hechas por Hagen et al. (2021) y Horan et al. (2021).
También se observó que el herrado con herradura de acero simple aumentó significativamente la instancia de breakover point al paso, con respecto al día 40. Este hecho se muestra nuevamente en concordancia con los estudios de Hagen et al. y de Horan et al., ambos del año 2021.
Para el día 0, el valor medio registrado para el periodo de contacto fue de 45ms, el valor medio del periodo de apoyo propiamente dicho de 67ms, para el apoyo medio de 524ms y, para la instancia de transición hacia el punto de ruptura, de 87 ms. A diferencia de la instancia de breakover point, la duración media del resto de las instancias se prolongó hacia el día 40. Por ende, el recorte de talones a partir del desvasado y herrado tendría un efecto positivo en la optimización de la ejecución de dichas instancias. En la tabla 3 se especifican los valores medios de cada instancia del apoyo.
| Contacto día 0 día 15 día 30 Día 40 Valor medio [ms] 45 48 48 53 valor maximo [ms] 46 54 53 55 valor mínimo [ms] 45 44 44 53 Apoyo propiamente dicho Valor medio [ms] 67 64 66 73 valor maximo [ms] 68 67 74 78 valor mínimo [ms] 66 54 56 53 Apoyo medio Valor medio [ms] 524 565 600 597 valor maximo [ms] 551 579 653 682 valor mínimo [ms] 480 542 559 484 Instancia previa al vuelco Valor medio [ms] 87 100 111 113 valor maximo [ms] 90 121 134 138 valor mínimo [ms] 78 90 89 94 |
Modificaciones de la mecánica locomotora consecuentes a asimetrías del apoyo
Aceleración y velocidad angular respecto del eje z
Las magnitudes registradas en términos de aceleración sobre el eje z expresaron los movimientos de aducción/ abducción de la extremidad distal del miembro torácico por retroceso elástico de los tendones, durante las instancias de retracción y protracción de la fase de elevación. La aceleración sobre este eje durante la fase de apoyo es positiva con valores medios de 0,74g.
El valor medio registrado de velocidad angular alrededor del eje vertical durante la fase de apoyo al día 0 fue de 0,26g/s y, de -0,28g/s al día 40. En este sentido, las prácticas de recorte y herrado mostraron tener un efecto inmediato sobre el equilibrio y la estabilidad del casco, el cual se perdió hacia el día 40, en sintonía con los cambios anteriormente evidenciados. En los casos de claudicación de apoyo de segundo grado, los valores medios de rotación tendieron a ser superiores a 1,41g/s, con un nivel de significancia de p = 0,008, en comparación con la media poblacional del grupo.
A su vez, la gráfica de datos sobre este eje permitió reflejar la llegada asincrónica de talones hacia la instancia del impacto mediante la esquematización de una onda bicúspide.
El comportamiento bicúspide de las ondas reflejó el grado de lateromoción/ mediomoción (Chateau et al., 2002) que experimentó el casco durante un apoyo asimétrico.
En los casos en los cuales el giro se efectuó hacia la abducción pasiva o lateromoción, la onda experimentó un sentido positivo que decayó progresivamente hacia valores negativos conforme se estabilizó el apoyo.
Cuando el casco efectuó un movimiento de rotación axial hacia la aducción pasiva o mediomoción, la onda experimentó un sentido negativo, el que escaló hacia valores positivos al finalizar el contacto.
Los ángulos de colateralomoción positiva y negativa se observaron congruentes con los estudios realizados por Chateau et al. (2002). Ambas situaciones fueron registradas en aquellas unidades de observación que presentaban desvíos rotacionales de la extremidad distal del miembro torácico o talones asimétricos (desbalance mediolateral). Este hecho también se registró en la instancia de breakover point, adoptando las características previamente descriptas.
Los indicadores de aceleración sobre los ejes x y z mostraron menor variación, siendo más estables a lo largo de la marcha en todos los equinos evaluados. Por otra parte, los indicadores de giro y de aceleración en y sufrieron cambios significativos (p<0,05) frente a pisada asimétrica y desvíos rotacionales del casco a la marcha, respectivamente.
Discusión y conclusiones
Existe la necesidad de determinar el cambio que experimenta la conformación del casco tras su acondicionamiento mediante prácticas rutinarias de desvasado/herrado, así como el efecto que este cambio ejerce sobre su dinámica (Kelleher et al., 2021).
Estudios adicionales podrían ayudar a veterinarios y herradores a optimizar el cuidado rutinario de los cascos y, además, brindar información útil para mejorar la biomecánica equina en caso de claudicación (Hagen et al., 2021; Horan et al., 2021; Kelleher et al., 2021; Mormann et al., 2013).
Los cambios leves en la marcha resultan difíciles de cuantificar visualmente. Por ende, los análisis de la marcha basados en la inercia (acelerómetro y giróscopo) ayudan a cuantificar cambios ya detectar anomalías en la misma (Ishihara et al., 2005; Keegan et al., 2002; Kelleher et al., 2021).
El empleo de sensores IMU’s permite identificar de forma gráfica pequeños eventos de movimiento, específicos de la marcha, la cual está influenciada por numerosos factores, incluyendo el tipo de suelo, la velocidad, el aplomo, la angulación del casco, la conformación del casco y su acondicionamiento frente a la colocación de herraduras.
Los resultados obtenidos respaldan intervalos regulares de herrado de 40 días para reducir los factores de riesgo de desarrollo de lesiones musculoesqueléticas a largo plazo, debido a la carga excesiva y acumulativa (Leśniak, et al., 2017).
A su vez, nuestros resultados sugieren que los cambios morfológicos del pie al día 0 conducen a una mejor distribución del peso en sentido dorsopalmar, disminuyendo los tiempos de contacto y apoyo. Hacia el día 40, la pérdida de angulación dorsopalmar y de talones, influye negativamente sobre el equilibrio dorsopalmar del pie, el cual termina por perderse. Este hecho conduce al cambio de la colocación del pie, el cual se refleja en un aumento del patrón de apoyo lateromedial, sobrecargando de forma asimétrica el casco.
El análisis estadístico sobre el comportamiento de las variables de cada animal, dividido en grupos de acuerdo con cada tiempo de medición, expresa diferencias significativas entre los grupos en relación con la variable dependiente. Se comprueba un efecto de interacción entre los factores acelx, acely, acelz, gyrox, gyroy y gyroz de las medias muestrales en relación con el tiempo de muestreo y se destaca el aumento en la duración de las instancias del contacto-apoyo y la disminución en los tiempos de breakover point (R² > 0,99).
Por lo tanto, se descarta nuestra hipótesis original, dado que se producen cambios significativos en el balance dinámico de los cascos dentro de un intervalo de herrado de 40 días. El resultado de estas prácticas desencadena respuestas dinámicas tempranas y tardías sobre el casco, como consecuencia de la adaptación de sus componentes estructurales. Por ende, los objetivos del herrado y su intervalo deben establecerse de forma individual para adecuarse a los requisitos morfológicos y funcionales de cada caso.
Agradecimientos
Los autores agradecen al Herrador profesional Santiago Lafite y sus colaboradores por su participación en este estudio. Este trabajo no ha recibido financiación externa.
Declaración de conflicto de Intereses
Los autores declaran la inexistencia de conflicto de intereses, incluyendo entre estos últimos las relaciones financieras, personales o de otro tipo con otras personas u organizaciones, que pudieran influir de manera inapropiada en el trabajo.
Declaración de autoría
Paula Analía Cánepa: conceptualización; metodología; curación de datos; escritura; preparación y redacción del borrador original; revisión y edición. Juan Manuel Chilo: metodología; curación de datos; revisión y edición. Marcos Gadze: diseño y programación del dispositivo para la ejecución de este estudio; supervisión y revisión. Martín Rodolfo Chilo: curación de datos; visualización gráfica; revisión y edición. Viviana De Palma: revisión.
Referencias
Antonioli ML, Canola PA, de Carvalho JRG, Fonseca MG, Ferraz GC. 2023. Immediate effect of hoof trimming on hoof and thoracic joint angles in Mangalarga mares. Animals: an open access journal from MDPI. 13(15):2490. https://doi.org/10.3390/ani13152490
Atkins CA, Pond KR, Madsen CK, Moorman VJ, Roman Muniz IN, Archibeque SL, Grandin T. 2019. Sensor analysis and initial assessment of detectable first hoof contacts and last break-overs as unique signal fluctuations for equine gait. Translational Animal Science. 3(4):1389-98. https://doi.org/10.1093/tas/txz089
Chateau H, Degueurce C, Jerbi H, Crevier-Denoix N, Pourcelot P, Audigiéa F, PasquiBoutard V, Denoix JM. 2002. Three-dimensional kinematics of the equine interphalangeal joints: articular impact of asymmetric bearing. Veterinary Research. 33(4):371-82. https://doi.org/10.1051/vetres:2002023
Clayton HM, Hobbs SJ. 2017. The rol of biomechanical analysis of horse and rider in equitation science. Applied Animal Behaviour Science. 190:123-32. https://doi.org/10.1016/j.applanim.2017.02.011
Davidson EJ. 2018. Lameness evaluation of the athletic horse. The Veterinary Clinics of North America: Equine Practice. 34(2):181-91. https://doi.org/10.1016/j.cveq.2018.04.013
Greve L, Dyson S. 2020.What can we learn from visual and objective assessment of nonlame and lame horses in straight lines, on the lunge and ridden? Equine Veterinary Education. 32(9):479-91. https://doi.org/10.1111/eve.13016
Hagen J, Bos R, Brouwer J, Lux S, Jung FT. 2021. Influence of trimming, hoof angle and shoeing on breakover duration in sound horses examined with hoof‐mounted inertial sensors. The Veterinary Record. 189(4):e450. http://dx.doi.org/10.1002/vetr.450
Horan K, Coburn J, Kourdache K, Day P, Harborne D, Brinkley L, Carnall H, Hammond L, Peterson M, Millard S, Pfau T. 2021. Influence of speed, ground surface and shoeing condition on hoof breakover duration in galloping thoroughbred racehorses. Animals: an open access journal from MDPI. 11(9):2588. https://doi.org/10.3390/ani11092588
Ishihara A, Bertone AL, Rajala Schultz PJ. 2005. Association between subjective lameness grade and kinetic gait parameters in horses with experimentally induced forelimb lameness. American Journal of Veterinary Research. 66(10):1805-15. https://doi.org/10.2460/ajvr.2005.66.1805
Keegan KG, Yonezawa Y, Pai PF, Wilson DA. 2002. Accelerometer-based system for the detection of lameness in horses. Biomedical Sciences Instrumentation. 38:107-12.
Kelleher ME, Burns TD, Werre SR, White NA.2021. The immediate effect of routine hoof trimming and shoeing on horses'gait. Journal of Equine Veterinary Science. 102:103633. https://doi.org/10.1016/j.jevs.2021.103633
Leelamankong P, Estrada R, Mählmann K, Rungsri P, Lischer, C. 2020. Agreement among equine veterinarians and between equine veterinarians and inertial sensor system during clinical examination of hindlimb lameness in horses. Equine Veterinary Journal. 52(2):326-31. https://doi.org/10.1111/evj.13144
Leśniak K, Williams J, Kuznik K, Douglas P. 2017. Does a 4-6week shoeing interval promote optimal foot balance in the working equine? Animals: an open access journal from MDPI. 7(4):29. https://doi.org/10.3390/ani7040029
Moorman VJ, Reiser RF, Peterson ML, McIlwraith CW, Kawcak CE. 2013. Effect of forelimb lameness on hoof kinematics of horses at a walk. American Journal of Veterinary Research. 74(9):1192-7. https://doi.org/10.2460/ajvr.74.9.1192
Serra Bragança FM, Rhodin M, Van Weeren PR. 2018.On the brink of daily clinical application of objective gait analysis: what evidence do we have so far from studies using an induced lameness model? The Veterinary Journal. 234:11-23. https://doi.org/10.1016/j.tvjl.2018.01.006

